本帖最后由 机器谱 于 2023-8-14 10:34 编辑
1. 运动功能说明
本文示例将实现R331样机双驱拖挂底盘运动的功能。
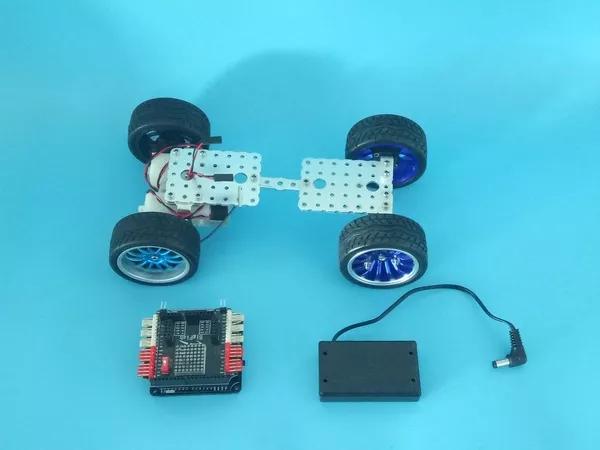
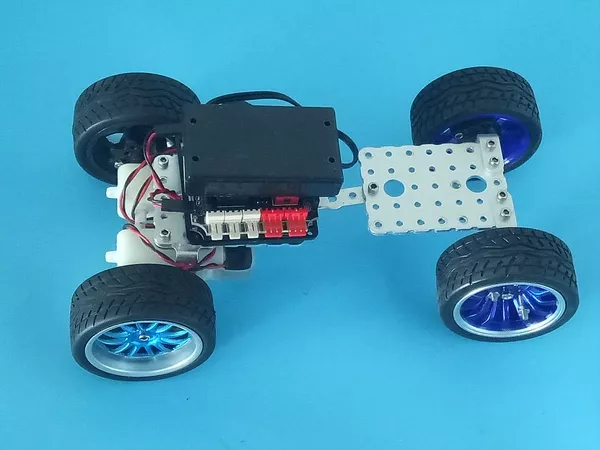
2. 结构说明
双驱拖挂底盘是一种具有两个驱动轴的车辆底盘,它由两个驱动轴、悬挂系统、转向系统和连接拖车的结构组成。以下是一些关于双驱拖挂底盘的主要特点和优势:
① 强大的牵引能力:由于具有两个驱动轴,双驱拖挂底盘能够提供更高的牵引力,使其可以轻松应对重载和陡坡等复杂道路条件。
② 稳定性和平衡性:双驱拖挂底盘的两个驱动轴能够提供更好的稳定性和平衡性,尤其是在不平坦的路面上。这有利于保持整车的稳定性,减少颠簸和倾覆的风险。
③ 操控灵活性:双驱拖挂底盘通常配备了可靠的转向系统,使得车辆在转弯时更加灵活。
3. 电子硬件
在这个示例中,我们采用了以下硬件,请大家参考:
主控板 | Basra主控板(兼容Arduino Uno)
| 扩展板 | Bigfish2.1扩展板
| 电池 | 7.4V锂电池 |
电路连接:左轮直流电机连在Bigfish扩展板的D5,D6接口;右轮直流电机连在Bigfish扩展板的D9,D10接口。
4. 运动功能实现
编程环境:Arduino 1.8.19
下面提供一个双驱拖挂底盘运动的参考例程(Moving_wheel.ino):
- /*------------------------------------------------------------------------------------
- 版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
- Distributed under MIT license.See file LICENSE for detail or copy at
- https://opensource.org/licenses/MIT
- by 机器谱 2023-07-20 https://www.robotway.com/
- ------------------------------*/
- void turnLeft();
- void stop();
- void forword();
- void turnRight();
- void setup()
- {
- pinMode( 10, OUTPUT);
- pinMode( 6, OUTPUT);
- pinMode( 5, OUTPUT);
- pinMode( 9, OUTPUT);
- pinMode( 5 , OUTPUT);
- pinMode( 6 , OUTPUT);
- pinMode( 9 , OUTPUT);
- pinMode( 10 , OUTPUT);
- }
- void loop()
- {
- //实现了小车的前进、左转、右转
- forword();
- turnLeft();
- stop();
- delay( 1000 );
- turnRight();
- stop();
- delay( 100000 );
- }
- void turnRight()
- {
- analogWrite(5 , 255);
- analogWrite(6 , 0);
- analogWrite(9 , 0);
- analogWrite(10 , 0);
- delay( 1500 );
- }
- void forword()
- {
- digitalWrite( 5 , HIGH );
- digitalWrite( 6 , LOW );
- digitalWrite( 9 , HIGH );
- digitalWrite( 10 , LOW );
- delay( 600 );
- }
- void turnLeft()
- {
- analogWrite(5 , 90);
- analogWrite(6 , 0);
- analogWrite(9 , 255);
- analogWrite(10 , 0);
- delay( 1500 );
- }
- void stop()
- {
- digitalWrite( 5 , LOW );
- digitalWrite( 6 , LOW );
- digitalWrite( 9 , LOW );
- digitalWrite( 10 , LOW );
- }
5. 资料下载
资料内容:
①程序源代码
②样机3D文件
资料下载地址:双驱拖挂底盘-概述 https://www.robotway.com/h-col-255.html
|


 发表于 2023-8-14 10:34:44
发表于 2023-8-14 10:34:44