本帖最后由 机器谱 于 2023-9-18 13:14 编辑
1.功能描述
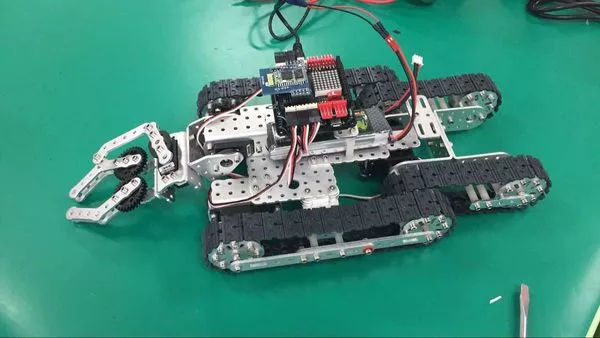
本文示例所实现的功能为:采用蓝牙远程遥控双节履带机械臂小车进行运动。
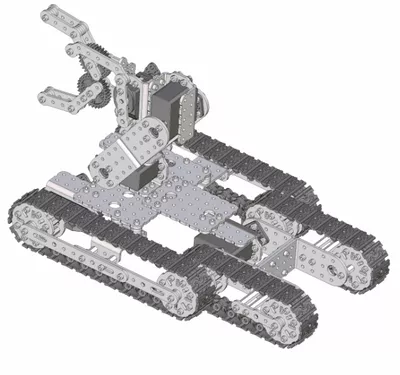
2.结构说明
双节履带机械臂小车,采用履带底盘,可适用于任何复杂地形。
前节履带抬起高度不低于10cm,可用于履带车进行爬楼行进。
底盘上装有一个两自由度机械臂,可用于排爆等工作。
3.电子硬件
在这个示例中,我们采用了以下硬件,请大家参考:
主控板 | Basra主控板(兼容Arduino Uno) | 扩展板 | Bigfish2.1扩展板 | 通信 | | 电池 | 7.4V锂电池 |
4.app安装与配置
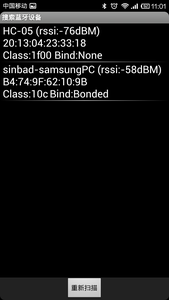
将文末资料中的“蓝牙串口助手.apk”安装到安卓手机中。将蓝牙模块连接到主控板并打开电源,然后在手机上运行蓝牙串口助手。
| | | 运行蓝牙串口助手 | 等待蓝牙设备扫描 | 点击HC-05(蓝牙模块设备名) |
| | | 输入PIN码:1234 | | |
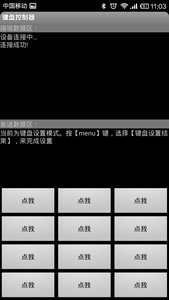
| | | 等待连接成功 | 按手机MENU建,打开菜单 | 在设定IO模式中,选择ASCII(图中是Hex,有误) |
| |
最后,设置终止符 选择最下面的/r/n
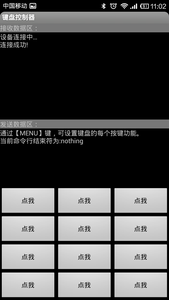
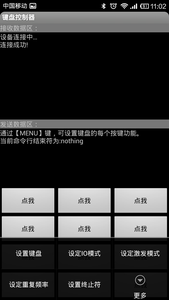
所有设置完成后,在菜单中点击结束键盘设置,然后任意按动按钮,即可操作。
如果操作失灵,请关闭手机app,关掉机器人电源。重新打开机器人电源,重新打开app连接蓝牙设备,并选择键盘模式。 | 在菜单中点击设置键盘 | 在键盘设置状态下,点击按钮 (各按钮设置内容如下表所示) |
|
按钮名称 | 发送内容 | 下撑 | 0@0:0=0(90,90,201,201,30);@ | 平铺 | 0@0:0=0(90,90,201,201,90);@ | 上撑 | 0@0:0=0(90,90,201,201,150);@ | 放下 | 0@0:0=0(90,90,10,201,201);@ | 前进 | 0@0:0=0(70,110,201,201,201);@ | 抬起 | 0@0:0=0(90,90,40,201,201);@ | 左转 | 0@0:0=0(110,110,201,201,201);@ | 停止 | 0@0:0=0(90,90,201,201,201);@ | 右转 | 0@0:0=0(70,70,201,201,201);@ | 打开 | 0@0:0=0(90,90,201,150,201);@ | 后退 | 0@0:0=0(110,70,201,201,201);@ | 夹取 | 0@0:0=0(90,90,201,100,201);@ |
5.功能实现
编程环境:Arduino 1.8.19
下面提供一个蓝牙远程遥控双节履带机械臂小车运动的参考程序(EODrobot.ino):
6.资料下载
资料内容:
①程序源代码
②样机3D文件
③蓝牙串口助手.apk
资料下载地址:双节履带机械臂小车-蓝牙遥控 https://www.robotway.com/h-col-262.html
|


 发表于 2023-9-18 13:13:00
发表于 2023-9-18 13:13:00