本帖最后由 机器谱 于 2023-3-24 09:35 编辑
1. 功能描述
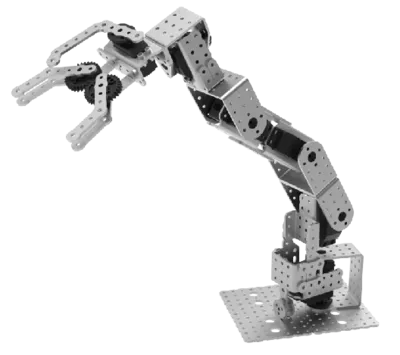
本文提供的示例所实现的功能为:实现5自由度串联机械臂搬运物品的功能。
2. 电子硬件
在这个示例中,我们采用了以下硬件,请大家参考:
| 主控板 | Basra主控板(兼容Arduino Uno) | | 扩展板 | Bigfish2.1扩展板 | | 舵机 | 270°伺服电机、标准舵机 | | 电池 | 7.4V锂电池 |
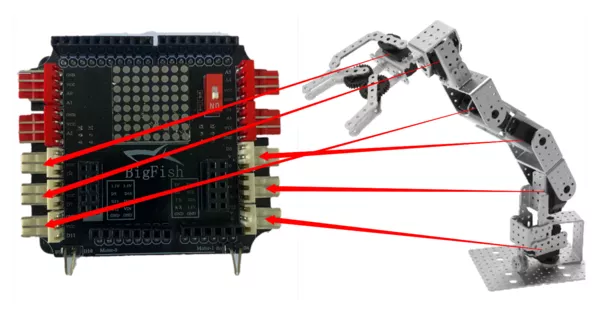
电路连接说明:
舵机接线:由上至下依次连接在Bigfish扩展板的D4、D7、D11、D3、D8、D12接口上。
3. 功能实现
上位机:Controller 1.0
下位机编程环境:Arduino 1.8.19
3.1初始位置的设定
① 将Controller下位机程序servo_bigfish.ino直接下载到主控板。这段代码供Controller上位机与主控板通信,并允许调试舵机。代码如下:
- /*------------------------------------------------------------------------------------
- 版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
- Distributed under MIT license.See file LICENSE for detail or copy at
- https://opensource.org/licenses/MIT
- by 机器谱 2023-02-20 https://www.robotway.com/
- ------------------------------
- /*
- * Bigfish扩展板舵机口; 4, 7, 11, 3, 8, 12, 14, 15, 16, 17, 18, 19
- * 使用软件调节舵机时请拖拽对应序号的控制块
- */
- #include <Servo.h>
- #define ANGLE_VALUE_MIN 0
- #define ANGLE_VALUE_MAX 180
- #define PWM_VALUE_MIN 500
- #define PWM_VALUE_MAX 2500
- #define SERVO_NUM 12
- Servo myServo[SERVO_NUM];
- int data_array[2] = {0,0}; //servo_pin: data_array[0], servo_value: data_array[1];
- int servo_port[SERVO_NUM] = {4, 7, 11, 3, 8, 12, 14, 15, 16, 17, 18, 19};
- int servo_value[SERVO_NUM] = {};
- String data = "";
- boolean dataComplete = false;
- void setup() {
- Serial.begin(9600);
-
- }
- void loop() {
-
- while(Serial.available())
- {
- int B_flag, P_flag, T_flag;
- data = Serial.readStringUntil('\n');
- data.trim();
- for(int i=0;i<data.length();i++)
- {
- //Serial.println(data[i]);
- switch(data[i])
- {
- case '#':
- B_flag = i;
- break;
- case 'P':
- {
- String pin = "";
- P_flag = i;
- for(int i=B_flag+1;i<P_flag;i++)
- {
- pin+=data[i];
- }
- data_array[0] = pin.toInt();
- }
- break;
- case 'T':
- {
- String angle = "";
- T_flag = i;
- for(int i=P_flag+1;i<T_flag;i++)
- {
- angle += data[i];
- }
- data_array[1] = angle.toInt();
- servo_value[pin2index(data_array[0])] = data_array[1];
- }
- break;
- default: break;
- }
- }
-
- /*
- Serial.println(B_flag);
- Serial.println(P_flag);
- Serial.println(T_flag);
-
- for(int i=0;i<2;i++)
- {
- Serial.println(data_array[i]);
- }
- */
-
- dataComplete = true;
- }
-
- if(dataComplete)
- {
- for(int i=0;i<SERVO_NUM;i++)
- {
- ServoGo(i, servo_value[i]);
- /*********************************串口查看输出***********************************/
- // Serial.print(servo_value[i]);
- // Serial.print(" ");
- }
- // Serial.println();
- /*********************************++++++++++++***********************************/
- dataComplete = false;
- }
-
- }
- void ServoStart(int which){
- if(!myServo[which].attached() && (servo_value[which] != 0))myServo[which].attach(servo_port[which]);
- else return;
- pinMode(servo_port[which], OUTPUT);
- }
- void ServoStop(int which){
- myServo[which].detach();
- digitalWrite(servo_port[which],LOW);
- }
- void ServoGo(int which , int where){
- ServoStart(which);
- if(where >= ANGLE_VALUE_MIN && where <= ANGLE_VALUE_MAX)
- {
- myServo[which].write(where);
- }
- else if(where >= PWM_VALUE_MIN && where <= PWM_VALUE_MAX)
- {
- myServo[which].writeMicroseconds(where);
- }
- }
- int pin2index(int _pin){
- int index;
- switch(_pin)
- {
- case 4: index = 0; break;
- case 7: index = 1; break;
- case 11: index = 2; break;
- case 3: index = 3; break;
- case 8: index = 4; break;
- case 12: index = 5; break;
- case 14: index = 6; break;
- case 15: index = 7; break;
- case 16: index = 8; break;
- case 17: index = 9; break;
- case 18: index = 10; break;
- case 19: index = 11; break;
- }
- return index;
- }
下载完成后,保持主控板和电脑的USB连接,以便利用上位机进行调试。
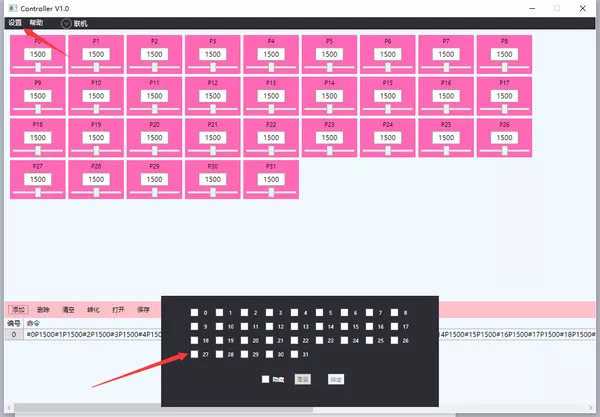
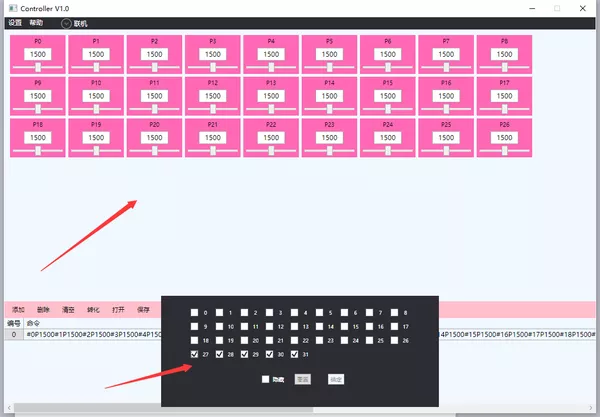
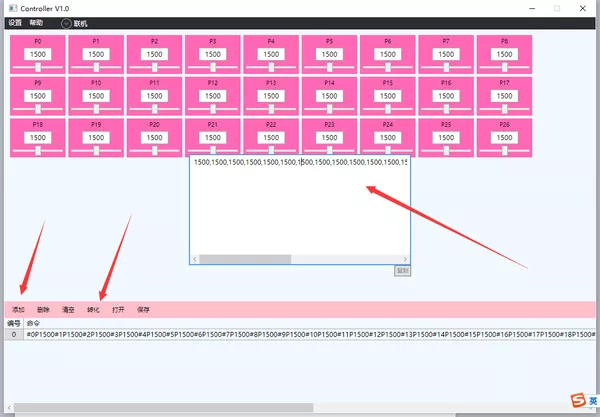
② 双击打开Controller 1.0b.exe:
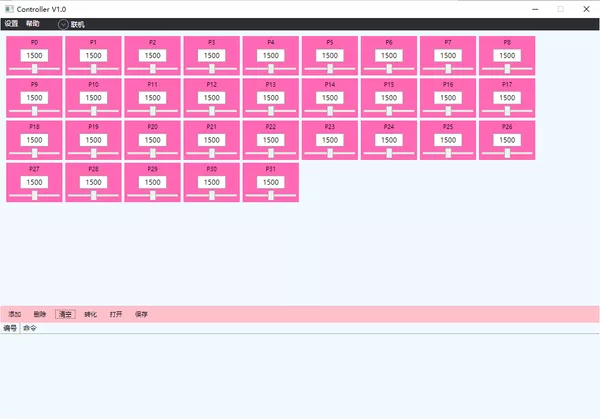
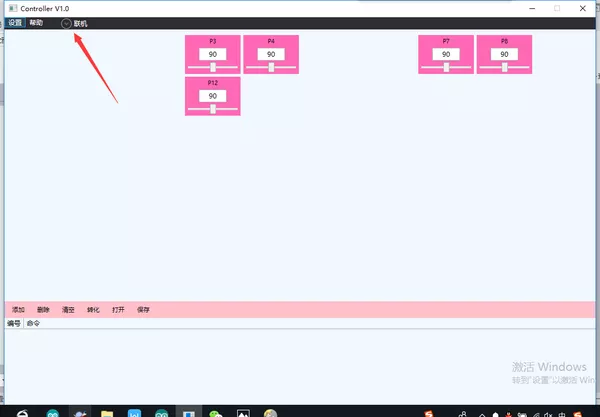
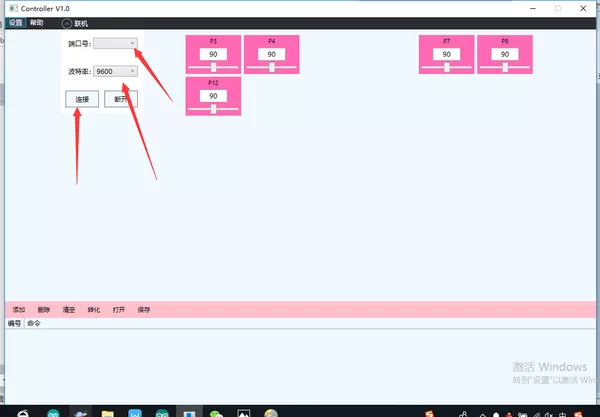
③ 界面左上角选择:设置-面板设置,弹出需要显示的调试块,可通过勾选隐藏不需要调试的舵机块:联机-选择主控板对应端口号以及波特率。
④ 拖动进度条,可以观察相应的舵机角度转动。写好对应的舵机调试角度,勾选左下角添加-转化,获得舵机调试的数组:
⑤ 将该数组直接复制到相应的Arduino程序中的get_coordinate()部分进行使用。
3.2调试好角度后,将机械臂搬运例程(5df_handling.ino)下载到主控板:
- /*------------------------------------------------------------------------------------
- 版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
- Distributed under MIT license.See file LICENSE for detail or copy at
- https://opensource.org/licenses/MIT
- by 机器谱 2023-02-20 https://www.robotway.com/
- ------------------------------*/
- /*
- 本程序要实现一个5自由度串联机械臂搬运物品的功能。
- 由机械臂从夹爪到底座的舵机依次连接在Bigfish扩展板的D4、D7、D11、D3、D8、D12接口上。
- */
- #define EYEINIT 174
- #define HEADINIT 90
- #define NECKINIT 124
- #define UPBODYINIT 72
- #define DOWNBODYINIT 100
- #define FOOTINIT 88
- #define EYE0 130
- #define HEAD0 90
- #define NECK0 170
- #define UPBODY0 160
- #define DOWNBODY0 79
- #define FOOT0 36
- #define EYE1 130
- #define HEAD1 90
- #define NECK1 170
- #define UPBODY1 160
- #define DOWNBODY1 80
- #define FOOT1 130
- #include<Wire.h>
- #include <Servo.h>
- #define PIN_SERVO_EYE 4 //定义各个舵机所对应的端口;
- #define PIN_SERVO_HEAD 7
- #define PIN_SERVO_NECK 11
- #define PIN_SERVO_UPBODY 3
- #define PIN_SERVO_DOWNBODY 8
- #define PIN_SERVO_FOOT 12
- #define OPERATE_TIME 3000
- #define SERVO_EYE 0 //定义各个舵机所对应的端口;
- #define SERVO_HEAD 1
- #define SERVO_NECK 2
- #define SERVO_UPBODY 3
- #define SERVO_DOWNBODY 4
- #define SERVO_FOOT 5
- int servoPin[6] = {PIN_SERVO_EYE, PIN_SERVO_HEAD, PIN_SERVO_NECK, PIN_SERVO_UPBODY,PIN_SERVO_DOWNBODY,PIN_SERVO_FOOT};
- Servo myServo[6];
- void setup() {
- // put your setup code here, to run once:
- delay(1000);
- Serial.begin(9600);
- resetArm();
- }
- void loop() {
- // put your main code here, to run repeatedly:
- resetArm(); //机械臂复位
- getCube(); //机械臂开始抓取货物
- putCube(); //机械臂开始释放货物
- delay(2000);//等待2秒
- }
- void resetArm(){ //舵机复位函数;
- for(int i = 0; i < 6; i++)
- myServo[i].attach(servoPin[i]);
- myServo[SERVO_EYE].write(EYEINIT);
- myServo[SERVO_HEAD].write(HEADINIT);
- myServo[SERVO_NECK].write(NECKINIT);
- myServo[SERVO_UPBODY].write(UPBODYINIT);
- myServo[SERVO_DOWNBODY].write(DOWNBODYINIT);
- myServo[SERVO_FOOT].write(FOOTINIT);
- delay(1500);
- }
- void getCube(){ //抓取物料动作序列函数;
- ServoMove(SERVO_FOOT, FOOTINIT, FOOT0, OPERATE_TIME);
- ServoMove(SERVO_UPBODY, UPBODYINIT,UPBODY0, OPERATE_TIME);
- ServoMove(SERVO_HEAD, HEADINIT, HEAD0, OPERATE_TIME);
- ServoMove(SERVO_NECK, NECKINIT, NECK0, OPERATE_TIME);
- ServoMove(SERVO_EYE, EYEINIT, EYE0, OPERATE_TIME);
- ServoMove(SERVO_DOWNBODY, DOWNBODYINIT, DOWNBODY0, OPERATE_TIME);
- ServoMove(SERVO_HEAD, HEAD0, HEADINIT, OPERATE_TIME);
- ServoMove(SERVO_UPBODY, UPBODY0, UPBODYINIT, OPERATE_TIME);
- ServoMove(SERVO_EYE, EYE0, EYEINIT, OPERATE_TIME);
- ServoMove(SERVO_NECK, NECK0, NECKINIT, OPERATE_TIME);
- ServoMove(SERVO_DOWNBODY, DOWNBODY0, DOWNBODYINIT, OPERATE_TIME);
- }
- void putCube() //机械臂开始释放货物
- {
- ServoMove(SERVO_FOOT, FOOT0, FOOT1 , OPERATE_TIME);
- ServoMove(SERVO_HEAD, HEADINIT, HEAD1, OPERATE_TIME);
- ServoMove(SERVO_NECK, NECKINIT, NECK1, OPERATE_TIME);
- ServoMove(SERVO_UPBODY, UPBODYINIT,UPBODY1, OPERATE_TIME);
- ServoMove(SERVO_EYE, EYEINIT, EYE1, OPERATE_TIME);
- ServoMove(SERVO_DOWNBODY, DOWNBODYINIT, DOWNBODY1, OPERATE_TIME);
- ServoMove(SERVO_HEAD, HEAD1, HEADINIT, OPERATE_TIME);
- ServoMove(SERVO_UPBODY, UPBODY1, UPBODYINIT, OPERATE_TIME);
- ServoMove(SERVO_EYE, EYE1, EYEINIT, OPERATE_TIME);
- ServoMove(SERVO_NECK, NECK1, NECKINIT, OPERATE_TIME);
- ServoMove(SERVO_DOWNBODY, DOWNBODY1, DOWNBODYINIT, OPERATE_TIME);
- ServoMove(SERVO_FOOT, FOOT1, FOOTINIT , OPERATE_TIME);
- }
- void ServoMove(int which, int _start, int _finish, long t) //舵机动作函数:它有四个参数,舵机号,初始角度,目标角度,动作时间;
- {
- static int direct;
- static int diff;
- static long deltaTime;
- if(_start <= _finish)
- direct = 1;
- else
- direct = -1;
- diff = abs(_finish - _start);
- deltaTime = (long) (t / 180);
-
- for(int i = 0; i < diff; i++){
- myServo[which].write(_start + i * direct);
- Serial.println(_start + i * direct);
- delay(deltaTime);
- }
- }
4. 资料下载
资料内容:
①Arduino搬运-例程源代码
②Controller1.0b资料包
资料下载地址:https://www.robotway.com/h-col-192.html
想了解更多机器人开源项目资料请关注 机器谱网站 https://www.robotway.com
|


 发表于 2023-3-24 09:35:01
发表于 2023-3-24 09:35:01