本帖最后由 机器谱 于 2023-4-25 10:05 编辑
1. 运动功能说明
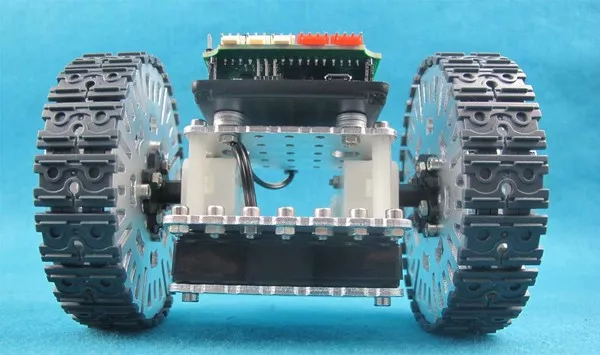
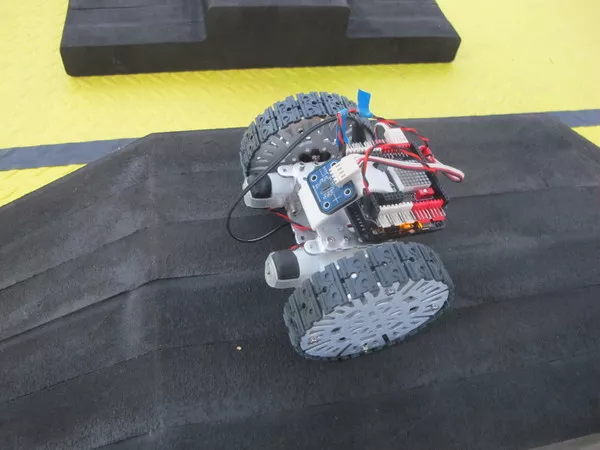
R209样机是一款双轮小车,适合作为自平衡车的实验模型。本文示例将实现双轮小车自主平衡功能,当人为的去打破小车的平衡点时,小车会自动调节至平衡点并稳定下来。
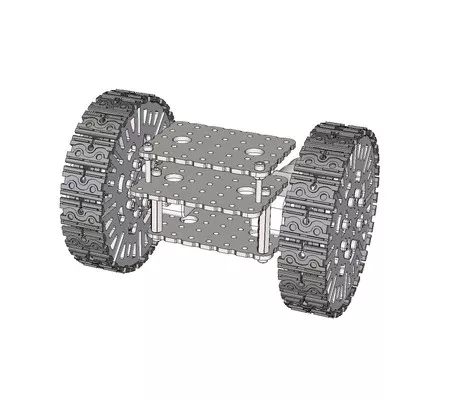
2. 结构说明
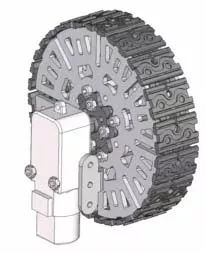
该样机主要由两个 直流驱动轮模组【https://www.robotway.com/h-col-117.html】构成。
3. 电子硬件
在这个示例中,我们采用了以下硬件,请大家参考:
| 主控板 | Basra主控板(兼容Arduino Uno) | | 扩展板 | Bigfish2.1扩展板 | | 传感器 | 加速度传感器 | | 电池 | 7.4V锂电池 |
4. 运动功能实现
编程环境:Arduino 1.8.19
将参考例程(self_balance_car.ino)下载到主控板,小车将实现双轮自平衡功能,运动效果可参考官网的实验演示视频。
- /*------------------------------------------------------------------------------------
- 版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
- Distributed under MIT license.See file LICENSE for detail or copy at
- https://opensource.org/licenses/MIT
- by 机器谱 2023-04-12 https://www.robotway.com/
- ------------------------------*/
- #include <SignalFilter.h>
- SignalFilter Filter;
- char filtered;
- int a,b,c,d;
- const int analogInPin = A0; // Analog input pin that the potentiometer is attached to
- int sensorValue = 0; // value read from the pot
- int outputValue = 0; // value output to the PWM (analog out)
- void setup() {
- // initialize serial communications at 9600 bps:
- Serial.begin(9600);
- Filter.begin();
- Filter.setFilter('m');
- Filter.setOrder(2);
- }
- void loop() {
- // read the analog in value:
- sensorValue = analogRead(analogInPin);
- // map it to the range of the analog out:
- char outputValue = map(sensorValue, 0, 1023, 0, 255);
- filtered= Filter.run(outputValue);
- int a=abs(filtered);
- if((a>=91)&&(a<=100))
- {
- analogWrite(9,0);
- analogWrite(10,0);
- analogWrite(5,0);
- analogWrite(6,0);
- delay(5);}
-
- if(a>=101)
- {
- c=a+(a-100)*5;
- d=a+20+(a-100)*5;
- analogWrite(9,0);
- analogWrite(10,c);
- analogWrite(5,0);
- analogWrite(6,d);
- delay(5);
- analogWrite(9,30);
- analogWrite(10,0);
- analogWrite(5,40);
- analogWrite(6,0);}
-
- if(a<=90)
- {c=a+(90-a)*3+40;
- d=a+20+(90-a)*3+40;
- analogWrite(9,c);
- analogWrite(10,0);
- analogWrite(5,d);
- analogWrite(6,0);
- delay(5);
- analogWrite(9,0);
- analogWrite(10,30);
- analogWrite(5,0);
- analogWrite(6,40);
- }
- Serial.print(a);Serial.print("/");
- Serial.print(c);Serial.print("/");
- Serial.println(d);
- }
5. 资料下载
资料内容:
①例程源代码
②样机3D文件
资料下载地址:https://www.robotway.com/h-col-207.html
想了解更多机器人开源项目资料请关注 机器谱网站 https://www.robotway.com
|


 发表于 2023-4-25 10:05:18
发表于 2023-4-25 10:05:18