本帖最后由 机器谱 于 2023-5-12 09:20 编辑
1. 功能说明
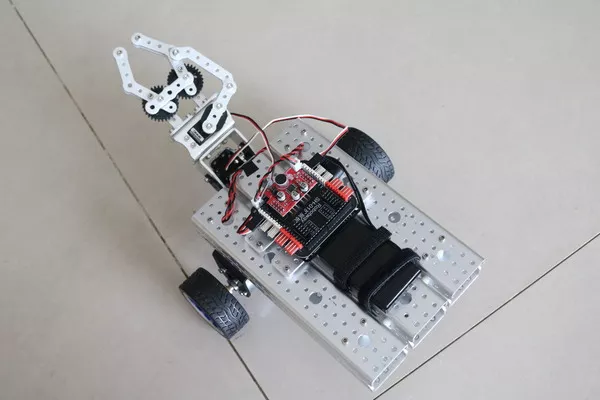
本文实例将实现语音控制R214e样机运动(前进、后退、左转、右转、拿起、放下)的功能。
2. 电子硬件
在这个示例中,我们采用了以下硬件,请大家参考:
主控板 | Basra主控板(兼容Arduino Uno)
| 扩展板 | Bigfish2.1扩展板
| 传感器 | 语音识别模块
| 电池 | 7.4V锂电池 |
电路连接:
① 小车左轮电机连到Bigfish扩展板的D9,D10接口;小车右轮电机连到Bigfish扩展板的D5,D6
② 将语音识别模块HBR640连接到Bigfish扩展板的扩展坞上
③ 将关节模块的舵机线连接到Bigfish扩展板的D11端口上
④ 将机械爪的舵机线连接到Bigfish扩展板的D12端口上
3. 功能实现
编程环境:Arduino 1.8.19
实现思路:语音命令机器人前进、后退、左转、右转、拿起、放下。
3.1 配置语音库
步骤1:将文末资料中的 \语音识别模块HBR640 文件夹拷贝至本机位置。
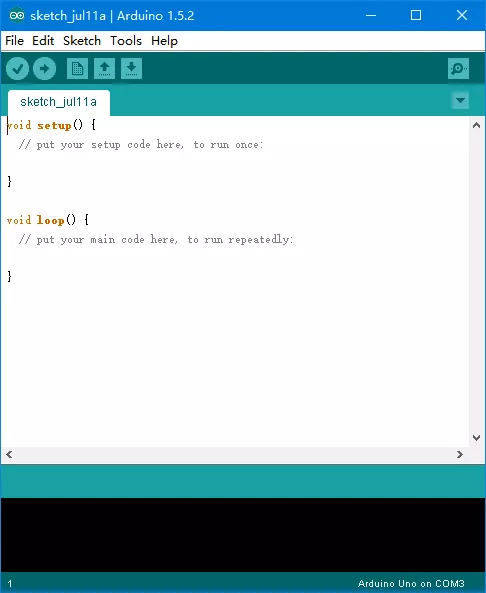
步骤2:将语音HBR640模块更改为 “配置模式” ,并用一个USB线将主控板连接至电脑上,将下图中的空程序烧录至主控板中
(注意:在烧录程序的时候,语音识别HBR640要从扩展板的扩展坞上拔下来)
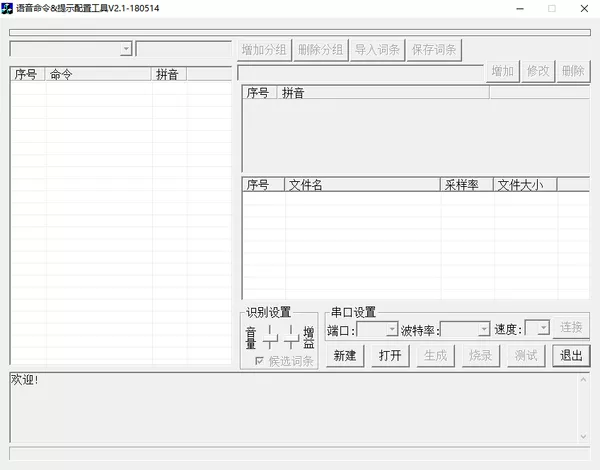
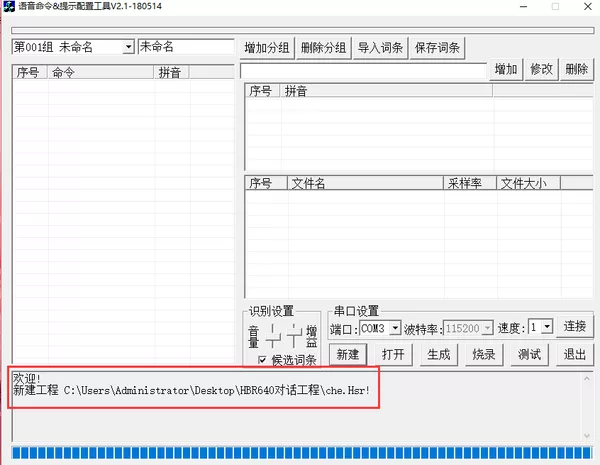
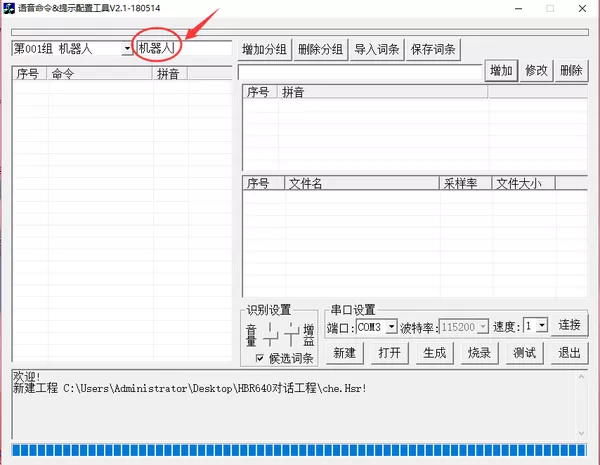
步骤3:打开 \语音识别模块HBR640\4 开发工具\HBR640开发工具:SRTool.exe(如下图所示)
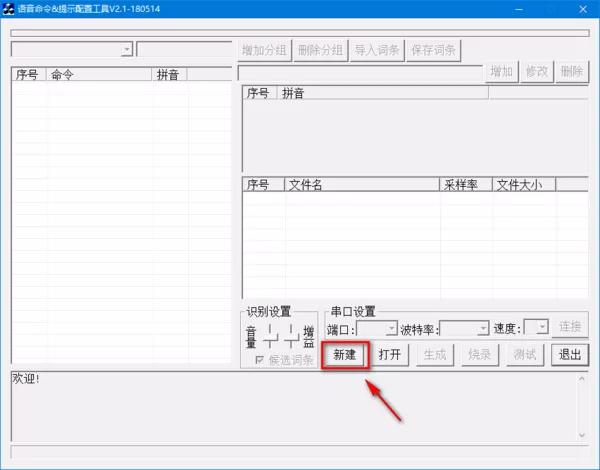
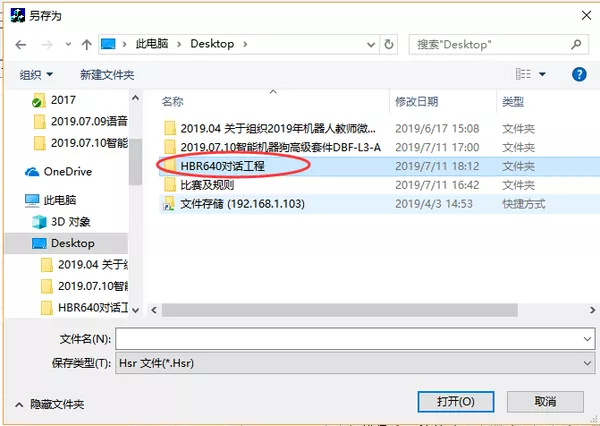
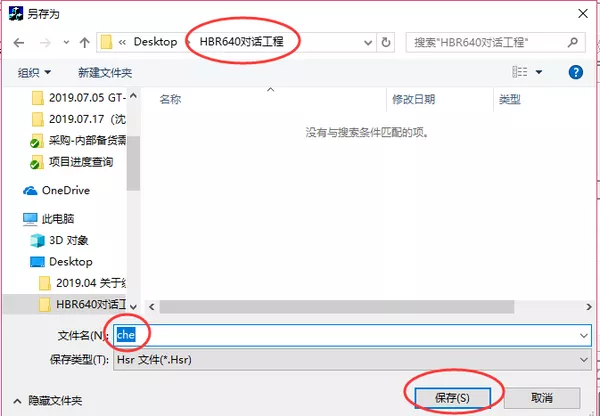
步骤4:先新建一个 “HBR640对话工程” 文件夹,然后在软件中点击 “新建”,选择“HBR640对话工程”文件夹后,再创建一个文件名“che”,点击 “保存”。
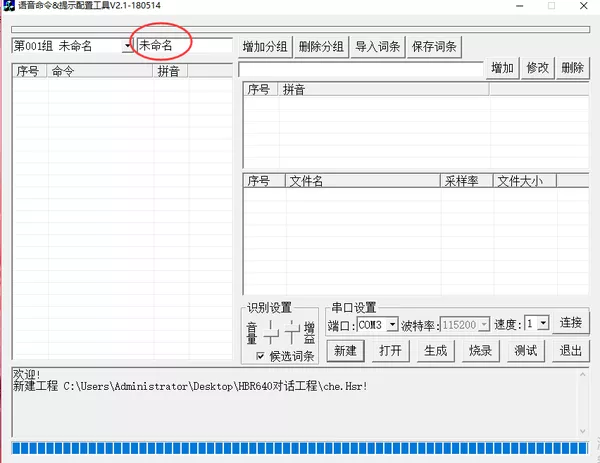
步骤5:在下图中的 “未命名” 区增加 “机器人” 分组。
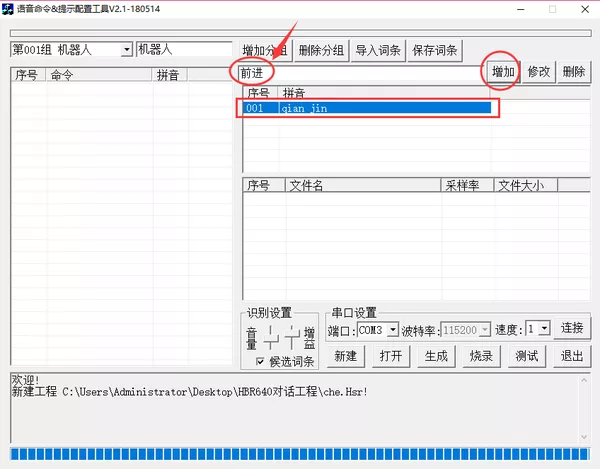
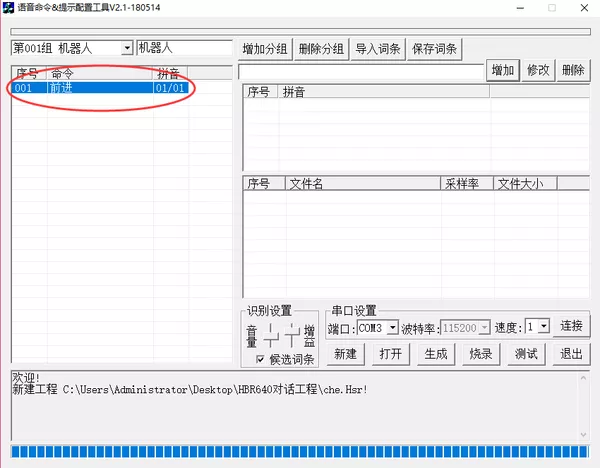
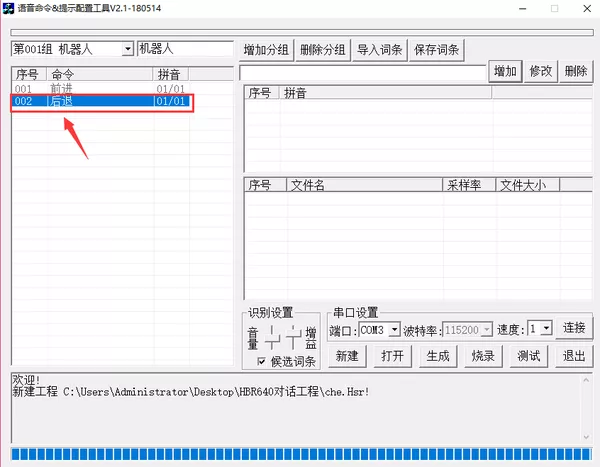
步骤6:在下图所示位置添加 “前进” 命令,然后点击 “增加” 按钮,即可将 “前进” 命令添加至左侧的词条列表中。
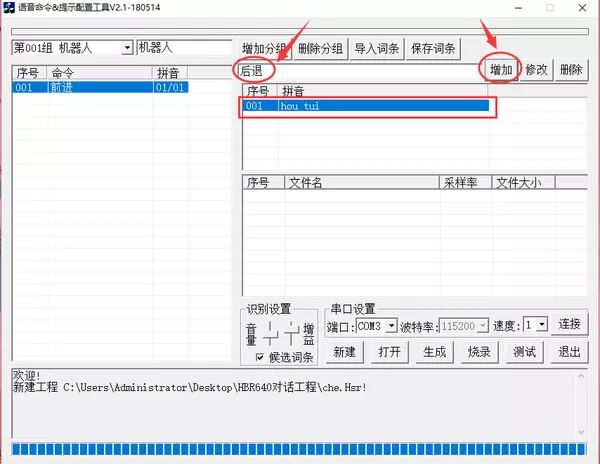
步骤7:在下图所示位置再添加 “后退” 命令,然后点击 “增加” 按钮,即可将 “后退” 命令添加至左侧的词条列表中。
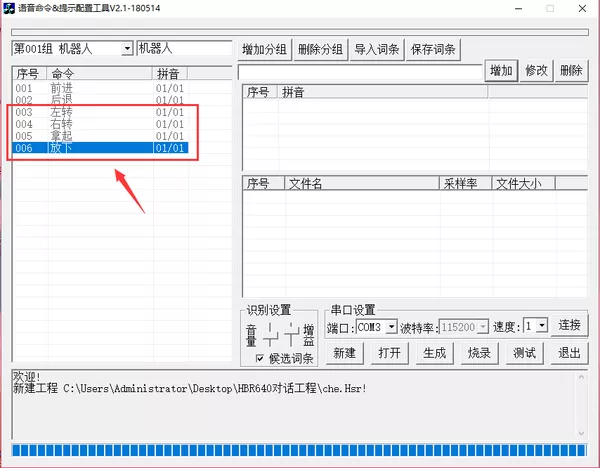
步骤8:按照步骤6、步骤7的方式依次再分别添加 “左转”、“右转”、“拿起”、“放下” 命令至左侧的词条列表中。
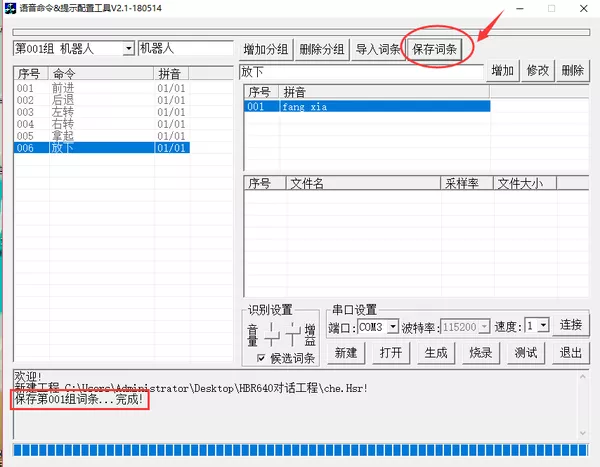
步骤9:点击 “保存词条”。
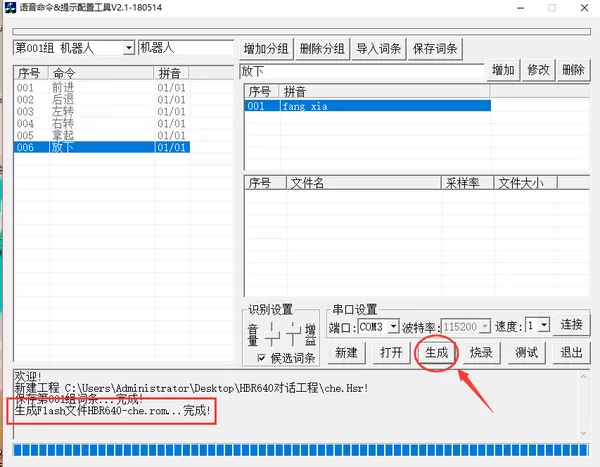
步骤10:点击 “生成” 按钮。
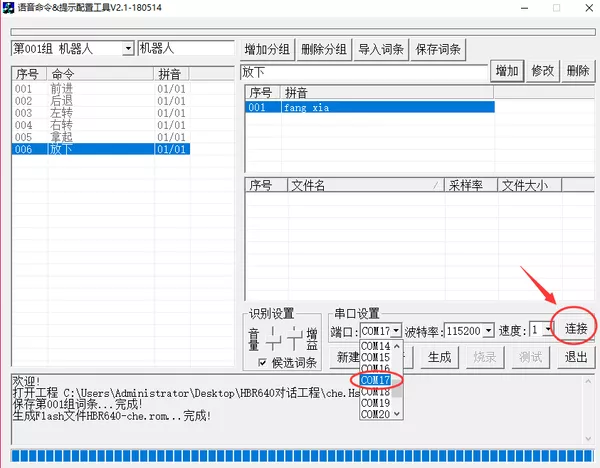
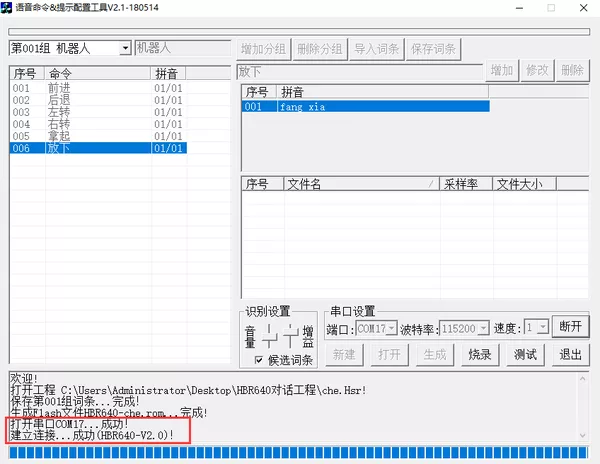
步骤11:选择端口号,并点击 “连接”,显示连接成功即可(这里以端口号COM17为例)
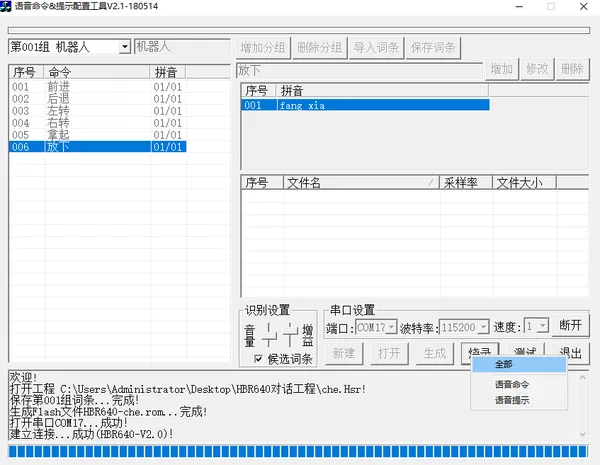
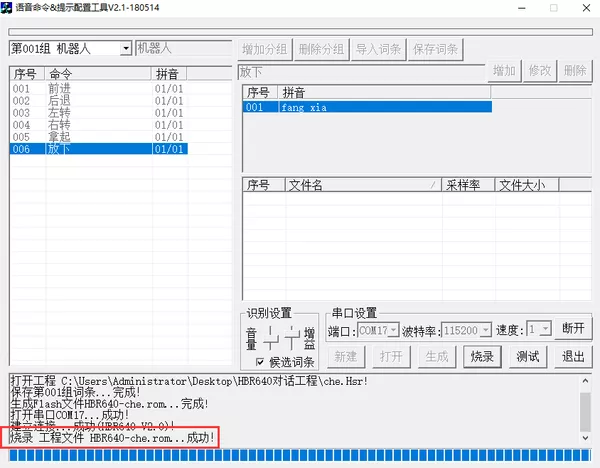
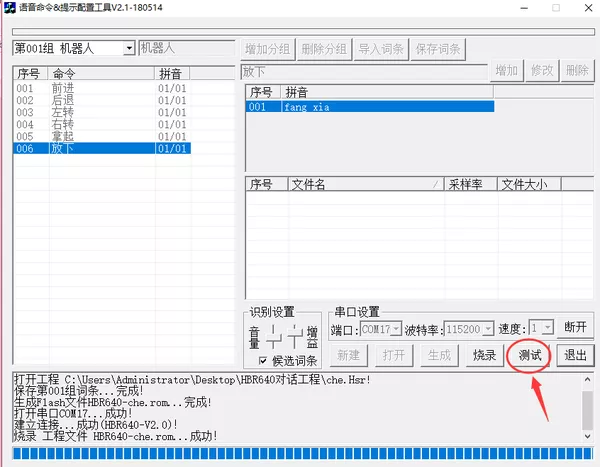
步骤12:点击 “烧录” 并选择 “全部”。在烧录过程中尽量不要移动主控板,显示烧录成功即可。
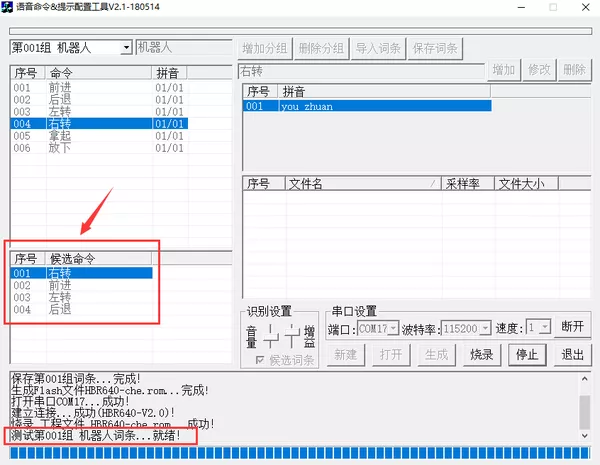
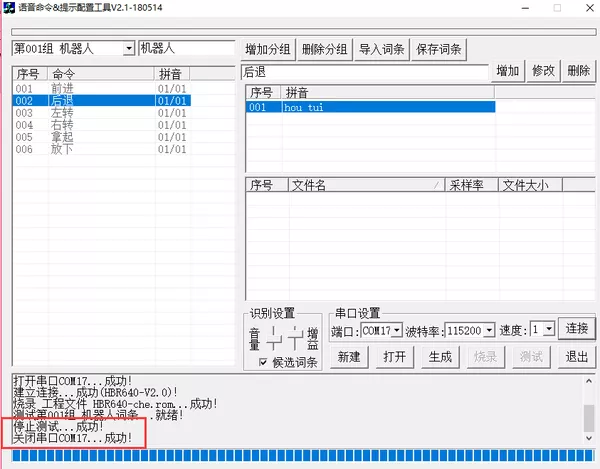
步骤13:点击 “测试” 按钮,会在左侧的词条列表下面出现 “候选命令” 区。
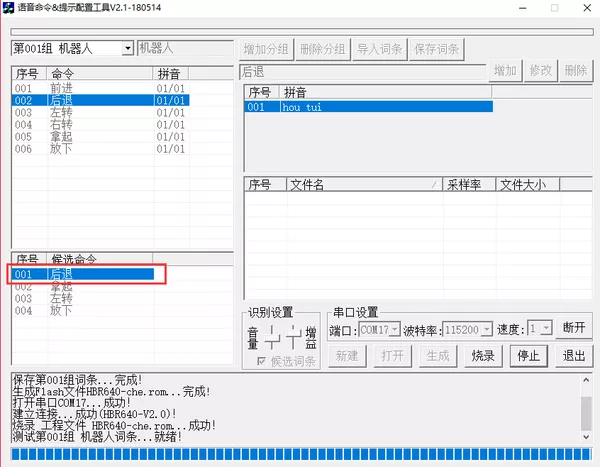
步骤14:对着语音识别模块分别说出刚刚编辑的命令“后退”、“前进”、“左转”、“右转”、“拿起”、“放下”时,会在 候选命令区 出对应的识别结果。
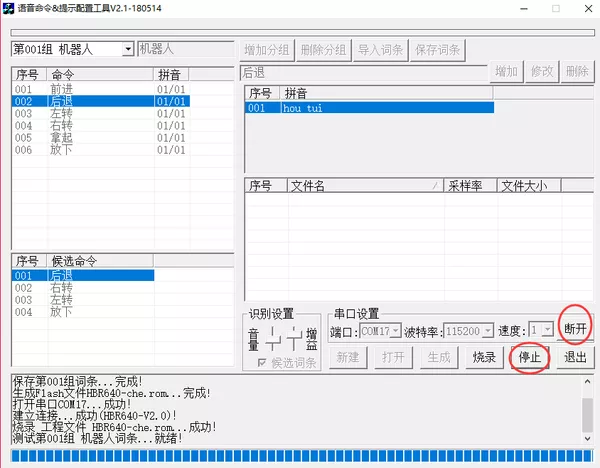
步骤15:测试成功后,点击“停止”按钮,并“断开”连接,此时语音库即已配置完成。
3.2 示例程序
将机器人语音控制程序(ohmygod.ino)下载到主控板,实验效果可参考官网演示视频。
- /*------------------------------------------------------------------------------------
- 版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
- Distributed under MIT license.See file LICENSE for detail or copy at
- https://opensource.org/licenses/MIT
- by 机器谱 2023-04-23 https://www.robotway.com/
- ------------------------------*/
- /*******************************************************************************************************
- 实现功能:
- 用语音640实现语音小车;
- 实现思路:
- 将语音640安装好后,如果接收到命令为“前进”,小车前进1秒后停止;如果接收到命令为“后退”,小车
- 后退1秒后停止;如果接收到命令为“左转”,小车左转1秒后停止;如果接收到命令为“右转”,小车右转
- 1秒后停止;如果接收到命令为“拿起”,机械爪抓取物体;如果接收到命令为“放下”,机械爪释放物体
- 实验接线:
- 小车左轮接到D9,D10;
- 小车右轮接到D5,D6;
- 语音640模块接到扩展板的扩展坞上;
- *******************************************************************************************************/
- #include<ServoTimer2.h>;
- ServoTimer2 servo_arm12;
- ServoTimer2 servo_leg11;
- #define servo_catch 63
- #define servo_release 80
- #define servo_up 30
- #define servo_down 70
- #include "HBR640.h" //语音640需要的函数库
- #define DelayTime 1000//小车执行相关动作的时间;
- HBR640 hbr640; //实例化一个语音识别模块
- void setup(){
- hbr640.open(); //开始进行语音识别
- pinMode( 5 , OUTPUT);
- pinMode( 6 , OUTPUT);
- pinMode( 9 , OUTPUT);
- pinMode( 10 , OUTPUT);//将直流电机设置为输出模式;
- servo_arm12.attach(12);
- servo_arm12.write(map(servo_release,0,180,500,2500));
- servo_leg11.attach(11);
- servo_leg11.write(map(servo_down,0,180,500,2500));
- }
- void loop(){
- if(hbr640.isHeard()) //如果监测到识别语句
- {
- int value = hbr640.getSentence(); //获得识别语句的序号
- switch (value)
- {
- case 0x00: MotorMode(1,DelayTime); hbr640.open();break;//如果接收到命令为“前进”,小车前进1秒后停止;
- case 0x01: MotorMode(2,DelayTime); hbr640.open();break;//如果接收到命令为“后退”,小车后退1秒后停止;
- case 0x02: MotorMode(3,DelayTime); hbr640.open();break;//如果接收到命令为“左转”,小车左转1秒后停止;
- case 0x03: MotorMode(4,DelayTime); hbr640.open();break;//如果接收到命令为“右转”,小车右转1秒后停止;
- case 0x04: down();delay(1000);Catch();delay(1000);up ();delay(1000); hbr640.open();break;//如果接收到命令为“拿起”,机械爪抓取物体
- case 0x05: down();delay(1000);Release(); delay(1000);up ();delay(1000);hbr640.open();break;//如果接收到命令为“放下”,机械爪释放物体
- default: break;
- }
- }
- }
- void Catch()//拿起
- {
- servo_arm12.write(map(servo_catch,0,180,500,2500));
- }
- void up ()//拿起
- {
- servo_leg11.write(map(servo_up,0,180,500,2500));
- }
- void Release()//放下
- {
- servo_arm12.write(map(servo_release,0,180,500,2500));
- }
- void down()//放下
- {
- servo_leg11.write(map(servo_down,0,180,500,2500));
- }
- void MotorMode(int mode,int t) //直流电机模式;
- {
- switch(mode)
- {
- case 1: Forward(t); break;
- case 2: Back(t); break;
- case 3: Left(t); break;
- case 4: Right(t); break;
- case 5: Stop(t); break;
- }
- }
- void Forward(int t) //前进
- {
- digitalWrite(5,LOW);digitalWrite(6,LOW);
- digitalWrite(10,HIGH);digitalWrite(9,HIGH);
- delay(t); Stop(2);
- }
- void Back(int t) //后退
- {
- digitalWrite(10,LOW);digitalWrite(9,LOW);
- digitalWrite(5,HIGH);digitalWrite(6,HIGH);
- delay(t); Stop(2);
- }
- void Left(int t) //左转
- {
- digitalWrite(5,HIGH);digitalWrite(6,LOW);
- digitalWrite(9,LOW);digitalWrite(10,HIGH);
- delay(t); Stop(2);
- }
- void Right(int t) //右转
- {
- digitalWrite(5,LOW);digitalWrite(6,HIGH);
- digitalWrite(10,LOW);digitalWrite(9,HIGH);
- delay(t); Stop(2);
- }
- void Stop(int t) //停止
- {
- digitalWrite(5,HIGH);digitalWrite(6,HIGH);
- digitalWrite(9,HIGH);digitalWrite(10,HIGH);
- delay(t);
- }
- void serialEvent() //程序会自动调用该程序;
- {
- hbr640.lisen(); //在串口接收事件中调用语音识别的监听指令
- }
观察语音控制效果(注意:将语音识别HBR640模块更改为运行模式)。
4. 资料下载
资料内容:
①语音控制-例程源代码
②语音控制-样机3D文件
③语音识别模块HBR640
资料下载地址:https://www.robotway.com/h-col-150.html
想了解更多机器人开源项目资料请关注 机器谱网站 https://www.robotway.com
|


 发表于 2023-5-12 09:20:15
发表于 2023-5-12 09:20:15