本帖最后由 机器谱 于 2023-6-1 09:24 编辑
1. 运动功能说明
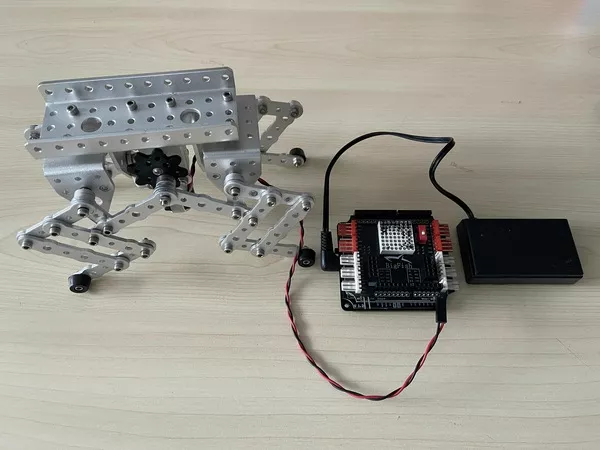
本文示例将实现R296样机连杆组简易四足机器人前进的功能。
2. 电子硬件
在这个示例中,我们采用了以下硬件,请大家参考:
主控板 | Basra主控板(兼容Arduino Uno)
| 扩展板 | Bigfish2.1扩展板
| 电池 | 7.4V锂电池 |
电路连接:直流电机连接在Bigfish扩展板的(5,6)引脚。
3. 运动功能实现
编程环境:Arduino 1.8.19
将参考例程(sketch_may11a.ino)下载到主控板,实验效果可参考官网演示视频。
- /*------------------------------------------------------------------------------------
- 版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
- Distributed under MIT license.See file LICENSE for detail or copy at
- https://opensource.org/licenses/MIT
- by 机器谱 2023-05-15 https://www.robotway.com/
- ------------------------------*/
- void setup()
- {
- pinMode( 5 , OUTPUT);
- pinMode( 6 , OUTPUT);
- }
- void loop()
- {
- digitalWrite( 5 , HIGH );
- digitalWrite( 6 , LOW );
- }
4. 步态变化
示例中的样机做出的是前腿(或后腿)同起同落的类似跳跃的动作,两条前腿的运动相位相同,两条后腿的运动相位相同,而两条前腿和两条后腿之间的运动相位相差180°。
通过调整输出头和连杆的安装位置(将一侧输出头旋转180°后安装),可以改变腿部的运动相位,让“左前腿、右后腿”相位相同,“左后腿、右前腿”相位相同,而这两组腿之间的运动相位相差180°,就可以实现像行走一样的对侧步步态。
5. 资料下载
资料内容:
①程序源代码
②样机3D文件
资料下载地址:https://www.robotway.com/h-col-227.html
想了解更多机器人开源项目资料请关注 机器谱网站 https://www.robotway.com
|


 发表于 2023-6-1 09:24:14
发表于 2023-6-1 09:24:14