1. 运动功能说明
棘轮小车(Ratchet Car)是一种基于棘轮原理设计的小型车辆,它结合了棘轮机制和移动装置,用于特定的应用场景,这种设计使得小车能够实现单向移动或防止逆向移动。棘轮小车的主要特点包括:
① 棘轮驱动:棘轮小车通常配备一个或多个棘轮装置,用于驱动车辆的轮子。棘轮的设计使得小车可以在一个方向上自由移动,而在反方向上则会被阻止。
② 移动装置:棘轮小车通常配备轮子或履带等移动装置,在平坦的表面上进行移动,移动装置的设计取决于具体的应用需求和地形环境。
③ 稳定性和安全性:棘轮小车的稳定性和安全性也是考虑的重要因素,适当的重心分布、抓地力和结构强度等都需要考虑,以确保小车在使用过程中稳定可靠。
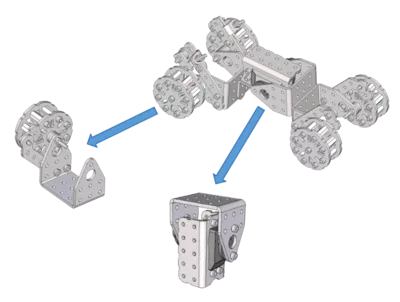
本文示例将实现R283样机棘轮小车运动行走的功能。


 发表于 2023-10-14 19:27:59
发表于 2023-10-14 19:27:59