本帖最后由 机器谱 于 2023-11-1 09:12 编辑
一、作品简介
作者:陈瑛、卢文博、刘沈军、 浦津、葛望东
单位:南京林业大学
指导老师:金慧萍、田涛
1. 背景调研及研究意义
1.1背景调研
随着我国社会经济水平的飞速发展和城市化的进程加速推进,居民生活水平有了较 大幅度的提升,随之而来的宠物业也得到了较大程度的发展,然而鉴于城市生活水平的 封闭性、个性化和人口老龄化等特点,人们生活中的休闲、消费和情感寄托方式也呈现 出多样化的发展,其中,家庭宠物的饲养已经成为了城市居民生活消遣的新方式。
宠物的喂养和看护往往是宠物主人最关心的问题,现阶段主要还是依靠人工进行喂 食与看护。由于人们携带宠物出行不方便以及上班时间无法照顾宠物等原因,也带来了 诸如宠物拆家、宠物自虐、无人喂食及随地大小便等居家“留守宠物”的系列问题。为 解决“留守宠物”问题目前市面上仅有喂食机、逗狗机等少量且功能单一的产品,已然 无法满足主人喂养及看护宠物的需求。为了解决饲养宠物的这一系列问题,减少主人的 烦恼,研制宠物用多功能智能机器人势在必行。为此,本作品设计了一款多功能智能养 宠机器人,在现有扫地机器人和陪玩机器人功能的基础上,运用语音视觉联动、yolov2 智能识别技术,进行了集成创新设计,实现了较好的人机交互功能,极大程度上满足了 爱宠人士的需求。
1.2研究意义
宠物智能机器人可以应对家中无人时宠物行踪不定、宠物丢失、喂养困难等问题,使用探索者机器人创新组件,设计了一种具有自动追踪、远程监控及识物投食功能的智能宠物机 器人进一步丰富了家居智能化的配置,在提高人们生活品质的同时,也减少了人们的出 行的后顾之忧。
2. 应用前景和社会价值
2.1应用前景
据《2020 年中国宠物行业白皮书》(消费报告)数据显示,目前我国宠 物总量已经超过 1 亿只,从 2010 年至 2016 年,国内宠物行业年复合增长高达 49%。《2022 年中国宠物行业市场前景及投资研究预测报告》显示,目前宠物市场规模已经达千亿, 71.4%的 00 后网民有养宠物的经历或意愿,且很多人将宠物视为“重要家人”,愿意为 .8. 其消费。随着人们与宠物亲密度的持续走高,预计 2021 年宠物市场规模还将突破 2000 亿元,宠物经济发展将持续高速繁荣。在市场高速发展中,各种新业态也有望借着东风 趁势而起,其中就包括了智能养宠。所谓智能养宠,顾名思义,就是利用各种智能技术 和智能设备来养宠,例如,机器人。
2.2社会价值
利用机器人养宠,能使养宠变得轻松和简单,宠物生活变得更好,同时 还能解决“空巢宠物”问题。在用户因为上班等各种原因无暇照顾宠物的情况下,通过 远程操控机器人就能照管宠物,保持人宠之间的亲密感和联系性,不管对于宠物还是主 人来说,机器人养宠都极具显著价值。
3. 作品创新点及前景展望和应用
3.1作品创新点
首先,本作品在树莓派上使用 yolov2 算法实现对猫,狗,猪等家庭动物的识别。 为宠物追踪,区分物种定量喂食奠定了技术支撑。其次,我们用树莓派识别到宠物后, 用 BestFit(最佳适应算法)实现了宠物自动追踪。接着通过使用 mjpg-streamer 将实时 监控到的视频推流到 PC 端,实现人机交互,从而用户可以实时观测到宠物的健康状况 以及所处位置等。最后针对不同的家庭动物,选择不同的食物,进行宠物投食;根据宠 物体型,定量投食,避免食物浪费。
3.2 作品前景展望及应用
应用前景:据《2020 年中国宠物行业白皮书》(消费报告)数据显示,目前我国宠 物总量已经超过 1 亿只,从 2010 年至 2016 年,国内宠物行业年复合增长高达 49%。《2022 年中国宠物行业市场前景及投资研究预测报告》显示,目前宠物市场规模已经达千亿, 71.4%的 00 后网民有养宠物的经历或意愿,且很多人将宠物视为“重要家人”,愿意为 .8. 其消费。随着人们与宠物亲密度的持续走高,预计 2021 年宠物市场规模还将突破 2000 亿元,宠物经济发展将持续高速繁荣。在市场高速发展中,各种新业态也有望借着东风 趁势而起,其中就包括了智能养宠。所谓智能养宠,顾名思义,就是利用各种智能技术 和智能设备来养宠,例如,机器人。 我们的项目在时代的大势下定能乘风破浪! 社会价值:利用机器人养宠,能使养宠变得轻松和简单,宠物生活变得更好,同时 还能解决“空巢宠物”问题。在用户因为上班等各种原因无暇照顾宠物的情况下,通过 远程操控机器人就能照管宠物,保持人宠之间的亲密感和联系性,不管对于宠物还是主 人来说,机器人养宠都极具显著价值。
4. 作品存在问题及改进方法
4.1作品存在的问题
技术功能的实用性:现阶段项目受到市场检验的机会不多,产品的使用效果、稳定 性、智能性、续航性、环境适应性等都还有待市场反馈。 鉴于此,我们一方面要加强机器人技术研发和升级,另一方面也要增加技术实际试 用,让我们的宠物机器人能更加满足需求,受到用户认可。
4.2作品改进方向
通过不断的研究和调试,当前机器人已经可以基本完成所有预想任务。上位机能够 正常播放来自机器人的视频数据。控制数据能够正常传输,机器人对控制终端的控制数 据有较好响应,控制延时可忽略不计,不影响控制体验。在调试实验中,机器人能清楚 的检测到宠物模型的位置及状态并即时反馈在视频端。机器人在接近宠物的运动过程也 较为顺畅,自动喂食和毛发处理功能的完成也充分达到预期效果,此机器人方便操作, 更能适应多种复杂的情况,既保证了使用者可以对宠物进行检测又为宠物独自在家提供 了保障。因此研究已经得到可行的论证。
二、总体功能设计
针对宠物无人看管的问题,设计了一个可以在家中无人看管时照看宠物的智能宠物 机器人。具有自主导航、宠物识别、自主避障、清理宠物毛发、自动喂食等功能。
(1) 智能交互功能:通过指令触发实现机器人指定控制功能,与用户实现智能交互;
(2)自主喂食功能:利用视觉识别检测到宠物的位置和状态,并在设定时间或者由直 接操作进行喂食功能。
(3)清理毛发功能:通过强力吸风机,将途径的灰尘和宠物毛发吸到储物盒之中,且 储物盒贴有粘性贴,可将灰尘和毛发粘到盒中,从而实现打扫屋内及清理宠物毛发的功 能。
(4)自主定位与导航:机器人在室内移动过程中根据视觉扫描和对自身位置的估计, 实现机器人的自主定位和导航;
(5)避障功能:通过与主控板相连接的红外传感器发送数据,指引驱动器进行避障。
宠物智能机器人实物图
1. 机器人机械设计
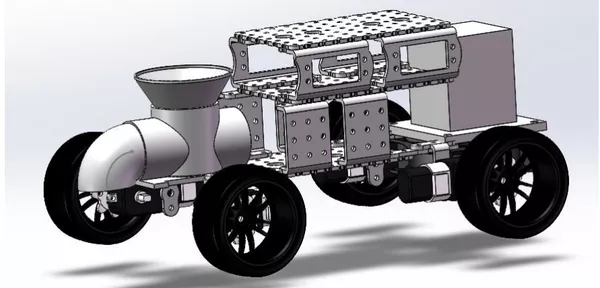
宠物机器人的外观三维设计图如下图所示。
宠物机器人的 3D 设计图
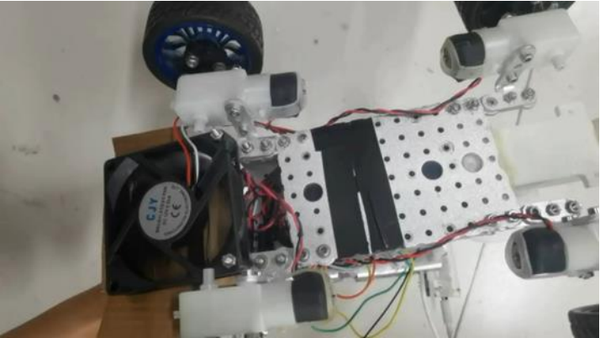
机器人的本体结构由喂食装置、探索者、宠物识别装置、压力传感器步进电机、清 理毛发装置组成。其具体结构如下图所示。
2. 软件功能实现
2.1宠物识别
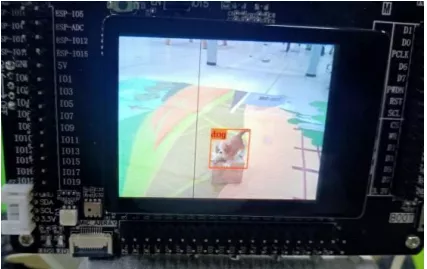
本作品在开发板上使用 yolov2 算法实现对猫、狗、猪等家庭动物的识别。为宠物 追踪、区分物种定量投食奠定了技术支撑。 本次研究在识别方面采用了 yolov2 的技术处理。yolov2 基于 DarkNet19 结构,它 有 19 个卷积层,有 3×3 的滤波器和 5 个最大集合层,与之前的层相比,通道的数量增 加了一倍。这提高了结果的准确性。通过在每个 3×3 卷积层之后增加一个 1×1 卷积层, 降低了网络计算的复杂性。这种复杂性的降低增加了图像处理的推理时间,优化了算法 的性能。yolov2 的功能是提高输入图像的分辨率,增加检测像素和检测信息量,有利于 提高检测精度。数据增强通过扩大输入数据集为模型添加特征。这通过随机裁剪和旋转 输入图像来进行,为模型增加维度。正如该算法的作者所说,"YOLO9000 预测了 9000 多个不同的物体类别的检测,而且都是实时的。yolov2 在每个卷积层之后都使用了批量 归一化(BN)。它将数据的分布统一为标准的正态分布,从而提高检测的准确性。 然而必须指出的是使用批量归一化和数据增量提高了准确性和 mAP,与之前的 yolo 版本相比,它也有定位误差。与 yolov2 相比,RCNN 和更快的 RCNN 的检测速度都很低, 因为 yolov2 的每秒帧数(FPS)更高。yolov2 单独使用 TITAN X GPU 的检测速度为 45 FPS, 而快速 YOLO 使用相同类型的 GPU 可以达到 155 FPS 的速度,因此训练 yolov2 网络的时 间减少了 50%。
宠物猫狗识别如下图:
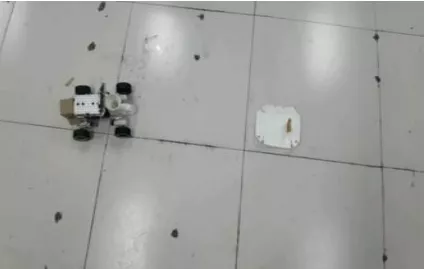
2.2宠物追踪
本作品识别到宠物后,用 BestFit(最佳适应算法)实现宠物自动追踪,并使用 mjpg-streamer 将实时监控到的视频推流到 PC 端,实现人机交互,从而用户可以实时观 测到宠物的健康状况以及所处位置等。
宠物追踪图
PC端宠物追踪图
2.3识物投食
本作品通过 3D 打印设计出喂食装置,在识别宠物后,通过电机推动旋钮,将狗粮 或猫粮投放到饭盘里,实现识别物种后定量喂食。识物投食如下图:
2.4清理毛发
本作品通过强力吸风机,吸到储发盒上部,储发盒上部贴有粘性贴,可将毛发粘到 上部,从而实现清理宠物毛发的功能。
清理毛发图
3. 技术路线
编程模块采用了较易上手的 Arduino 来最大程度实现各项功能的完成。它构建于开 放原始码 simple I/O 介面版,并且具有使用类似 Java、C 语言的 Processing/Wiring 开发环境。主要包含两个部分:硬件部分是可以用来做电路连接的 Arduino 电路板;另 外一个则是 Arduino IDE,计算机中的程序开发环境。只需要在 IDE 中编写程序代码, 将程序上传到 Arduino 电路板后,程序便会将指令传向 Arduino 电路板,进而完成最终 的操作响应。Arduino 能通过各种各样的传感器来感知环境,通过控制灯光、马达和其 他的装置来反馈、影响环境。板子上的微控制器可以通过 Arduino 的编程语言来编写程 序,编译成二进制文件,烧录进微控制器。对 Arduino 的编程是通过 Arduino 编程语言 (基于 Wiring)和 Arduino 开发环境(基于 Processing)来实现的。
三、程序代码
1. 示例程序
①使用MaixPy板上的摄像头执行对象检测并将结果显示在LCD上。
- # generated by maixhub, tested on maixpy3 v0.4.8
- # copy files to TF card and plug into board and power on
- import sensor, image, lcd, time
- import KPU as kpu
- import gc, sys
- input_size = (224, 224)
- labels = ['dog']
- anchors = [4.22, 4.12, 3.69, 3.38, 3.62, 4.03, 5.16, 4.72, 1.94, 3.69]
- def lcd_show_except(e):
- import uio
- err_str = uio.StringIO()
- sys.print_exception(e, err_str)
- err_str = err_str.getvalue()
- img = image.Image(size=input_size)
- img.draw_string(0, 10, err_str, scale=1, color=(0xff,0x00,0x00))
- lcd.display(img)
- def main(anchors, labels = None, model_addr="/sd/m.kmodel", sensor_window=input_size,
- lcd_rotation=0, sensor_hmirror=False, sensor_vflip=False):
- sensor.reset()
- sensor.set_pixformat(sensor.RGB565)
- sensor.set_framesize(sensor.QVGA)
- sensor.set_windowing(sensor_window)
- sensor.set_hmirror(sensor_hmirror)
- sensor.set_vflip(sensor_vflip)
- sensor.run(1)
- lcd.init(type=1)
- lcd.rotation(lcd_rotation)
- lcd.clear(lcd.WHITE)
- if not labels:
- with open('labels.txt','r') as f:
- exec(f.read())
- if not labels:
- print("no labels.txt")
- img = image.Image(size=(320, 240))
- img.draw_string(90, 110, "no labels.txt", color=(255, 0, 0), scale=2)
- lcd.display(img)
- return 1
- try:
- img = image.Image("startup.jpg")
- lcd.display(img)
- except Exception:
- img = image.Image(size=(320, 240))
- img.draw_string(90, 110, "loading model...", color=(255, 255, 255), scale=2)
- lcd.display(img)
- try:
- task = None
- task = kpu.load(model_addr)
- kpu.init_yolo2(task, 0.5, 0.3, 5, anchors) # threshold:[0,1], nms_value: [0, 1]
- while(True):
- img = sensor.snapshot()
- t = time.ticks_ms()
- objects = kpu.run_yolo2(task, img)
- t = time.ticks_ms() - t
- if objects:
- for obj in objects:
- pos = obj.rect()
- img.draw_rectangle(pos)
- img.draw_string(pos[0], pos[1], "%s : %.2f" %(labels[obj.classid()],
- obj.value()), scale=2, color=(255, 0, 0))
- img.draw_string(0, 200, "t:%dms" %(t), scale=2, color=(255, 0, 0))
- lcd.display(img)
- except Exception as e:
- raise e
- finally:
- if not task is None:
- kpu.deinit(task)
- if __name__ == "__main__":
- try:
- # main(anchors = anchors, labels=labels, model_addr=0x300000, lcd_rotation=0)
- main(anchors = anchors, labels=labels, model_addr="/sd/model-20830.kmodel")
- except Exception as e:
- sys.print_exception(e)
- lcd_show_except(e)
- finally:
- gc.collect()
- #!/usr/bin/python
- import sys
- import RPi.GPIO as gpio
- import time
- import signal
- import os
- import mosquitto
- enablePin = 18
- dirPin = 23
- stepPin = 24
- WaitTime = 0.0025
- cameraTakeCmd = '/usr/bin/raspistill -t 1 -w 640 -h 480 -vf -hf -o /mnt/feeder/latest.jpg &'
- # set up io pins..
- gpio.setmode(gpio.BCM)
- gpio.setup(dirPin, gpio.OUT)
- gpio.setup(stepPin, gpio.OUT)
- gpio.setup(enablePin, gpio.OUT)
- gpio.output(enablePin, False)
- def exitHandler(signum, frame):
- print 'We are out of here...'
- gpio.output(enablePin, False)
- gpio.cleanup()
- exit()
- #define what happens after connection
- def on_connect(rc):
- print "Connected"
- #On recipt of a message create a pynotification and show it
- def on_message(msg):
- print "Topic: " + msg.topic
- print "Payload: " + msg.payload
- topic = msg.topic.split('/',1)
- direction = topic[1]
- print "Instruction: " + direction + ", Value: " + msg.payload
- if direction == 'photo':
- if msg.payload == 'take':
- print "Photo time!"
- os.system(cameraTakeCmd);
- motorAction = 0
- if direction == 'retract':
- gpio.output(dirPin, True)
- motorAction = 1
- elif direction == 'feed':
- gpio.output(dirPin, False)
- motorAction = 1
- if motorAction:
- gpio.output(enablePin, True)
- steps = int(msg.payload)
- StepCounter = 0
- while StepCounter < steps:
- gpio.output(stepPin, True)
- gpio.output(stepPin, False)
- StepCounter += 1
- time.sleep(WaitTime)
- gpio.output(enablePin, False)
- #create a broker
- mqttc = mosquitto.Mosquitto("catfeeder")
- #define the callbacks
- mqttc.on_message = on_message
- mqttc.on_connect = on_connect
- mqttc.reconnect = on_connect
- #connect
- mqttc.connect("10.0.0.1", 1883, 60, True)
- #subscribe to topic test
- mqttc.subscribe("catfeeder/#", 0)
- #tidy up nice like...
- signal.signal(signal.SIGINT, exitHandler)
- #keep connected to broker
- while mqttc.loop() == 0:
- pass
- #define BLINKER_PRINT Serial
- #define BLINKER_BLE
- #include <Blinker.h>
- #define PWMA 12 //控制电机1的方向A,zuo1
- #define PWMB 13 //控制电机1的方向B,zuo2
- #define PWMC 14 //控制电机2的方向A,you1
- #define PWMD 27 //控制电机2的方向B,you2
- int pwm_val = 255;//PWM输出值,改变数值用于调速,最大255,最小0
- // 新建组件对象,组件名称见引号
- BlinkerButton Button1("go");
- BlinkerButton Button2("down");
- BlinkerButton Button3("left");
- BlinkerButton Button4("right");
- BlinkerButton Button5("stop");
- //函数声明
- /*-------回调函数:软件中按下按键执行对应按键的函数,组件名称 软件中自定 见上 要放到setup之前--
- -----------------------------按键1:功能向前,执行向前函数-----------------------------
- -----------------------------按键2:功能向后,执行向后函数-----------------------------
- -----------------------------按键3:功能向左,执行向左函数-----------------------------
- -----------------------------按键4:功能向右,执行向右函数-----------------------------
- -----------------------------按键5:功能停止,执行停止函数-----------------------------*/
- void button1_callback(const String & state)
- {·
- BLINKER_LOG("get button state: ", state);
- forward();
- }
- void button2_callback(const String & state)
- {
- BLINKER_LOG("get button state: ", state);
- backward();
- }
- void button3_callback(const String & state)
- {
- BLINKER_LOG("get button state: ", state);
- turnleft();
- }
- void button4_callback(const String & state)
- {
- BLINKER_LOG("get button state: ", state);
- turnright();
- }
- void button5_callback(const String & state)
- {
- BLINKER_LOG("get button state: ", state);
- stopk();
- }
- void setup()
- {
- Serial.begin(115200);
-
- pinMode(PWMA, OUTPUT);
- pinMode(PWMB, OUTPUT);
- pinMode(PWMC, OUTPUT);
- pinMode(PWMD, OUTPUT);
-
- ledcsetup(1,12000,8,PWMA);
- ledcsetup(2,12000,8,PWMB);
- ledcsetup(3,12000,8,PWMC);
- ledcsetup(4,12000,8,PWMD);
-
- #if defined(BLINKER_PRINT)
- BLINKER_DEBUG.stream(BLINKER_PRINT);
- #endif
- Blinker.begin();
- Button1.attach(button1_callback);
- Button2.attach(button2_callback);
- Button3.attach(button3_callback);
- Button4.attach(button4_callback);
- Button5.attach(button5_callback);
- }
- void loop()
- {
- Blinker.run();
- }
- /*-----------PWM生成初始化(LEDC通道初始化)-----------------*/
- void ledcsetup(int channel,int freq,int resolution,int pin)
- {
- ledcSetup(channel, freq, resolution); // 设置通道
- ledcAttachPin(pin, channel); // 将通道与对应的引脚连接
- }
- /*----------------------转向函数--------------------------*/
- void forward()
- {
- Serial.println("FORWARD"); //输出状态
- ledcWrite(1, pwm_val);
- ledcWrite(2, 0);
- ledcWrite(3,pwm_val);
- ledcWrite(4, 0);
- }
- void backward()
- {
- Serial.println("BACKWARD"); //输出状态
- ledcWrite(1, 0);
- ledcWrite(2, pwm_val);
- ledcWrite(3, 0);
- ledcWrite(4, pwm_val);
- }
- void turnleft()
- {
- Serial.println("TURNLEFT"); //输出状态
- ledcWrite(1, 0);
- ledcWrite(2, 0);
- ledcWrite(3, 0);
- ledcWrite(4,pwm_val);
- }
- void turnright()
- {
- Serial.println("TURNRIGHT"); //输出状态
- ledcWrite(1, 0);
- ledcWrite(2, pwm_val);
- ledcWrite(3, 0);
- ledcWrite(4, 0);
- }
- void stopk()//stop是Arduino.h函数,因此不能使用其名称新建函数
- {
- Serial.println("STOP"); //输出状态
- ledcWrite(1, 0);
- ledcWrite(2, 0);
- ledcWrite(3, 0);
- ledcWrite(4, 0);
- }
更多详情请参考 https://www.robotway.com/h-col-279.html
|


 发表于 2023-11-1 09:12:51
发表于 2023-11-1 09:12:51