本帖最后由 机器谱 于 2023-11-24 10:23 编辑
1. 功能描述
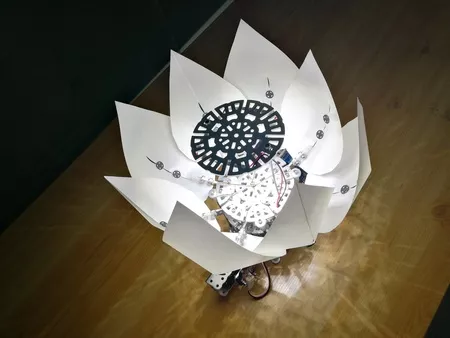
莲花灯是一款基于莲花形象设计的机器人,本文示例将用两种模式来实现莲花灯的亮灭功能。
自主模式:用 光强传感器【https://www.robotway.com/h-col-137.html】 控制莲花灯的灯叶开合。暗光情况下灯叶打开,灯亮;强光情况下灯叶闭合,灯灭。
遥控模式:采用 蓝牙串口模块【https://www.robotway.com/h-col-141.html】 控制灯叶开合。灯叶打开,灯亮;灯叶闭合,灯灭。
2. 结构说明
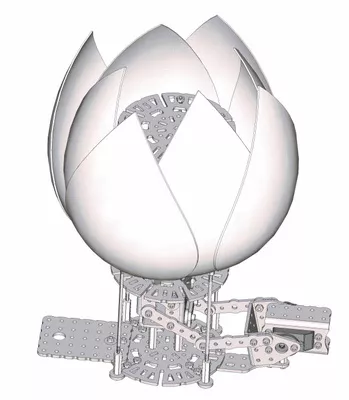
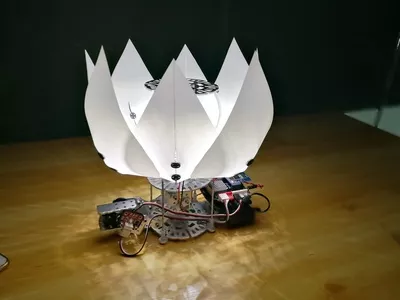
莲花灯采用“探索者”结构件搭建、辅以外观设计而成,由曲柄摇杆机构和平行四连杆机构构成一个二级升降机构,通过杠杆来控制莲花灯的开合。
莲花灯的灯叶开合主要是由膨胀机构来控制的,膨胀轮是整个结构的核心部分,这种结构的优点是可实现收缩和膨胀,从而来控制灯叶的开合。
膨胀轮
3. 电子硬件
在这个示例中,我们采用了以下硬件,请大家参考:
主控板 | Basra主控板(兼容Arduino Uno)
| 扩展板 | Bigfish2.1扩展板
| 传感器
| | 通信
| 蓝牙串口模块
| 电池 | 7.4V锂电池 |
电路连接:
① 灯带:连在Bigfish扩展板的D9、D10接口上
② 舵机:连在Bigfish扩展板的D4端口上
③ 蓝牙串口模块:安装在Bigfish扩展坞上
④ 光强传感器:连在Bigfish扩展板的A0端口上
4. 功能实现
4.1自主模式
编程环境:Arduino 1.8.19
下面提供一个实现暗光情况下灯叶打开,灯亮;强光情况下灯叶闭合,灯灭的参考程序(light.ino):
4.2遥控模式
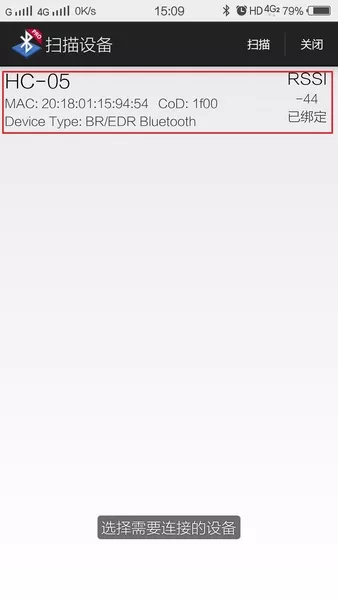
APP设置:将文末资料中的“BLE_SPP_PRO.apk”安装到手机中。
① 搜索蓝牙
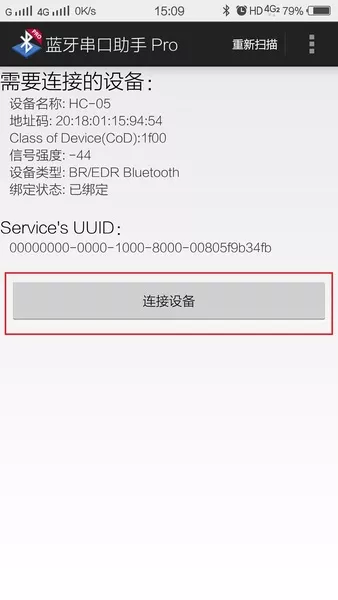
② 连接蓝牙
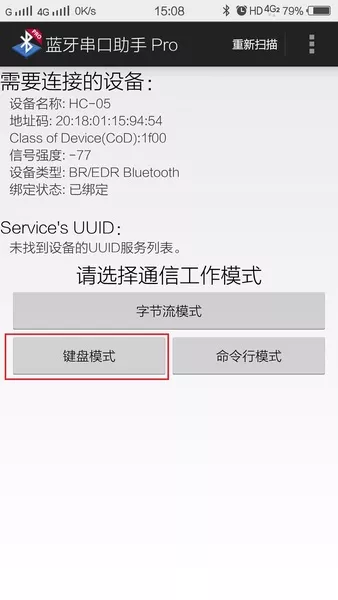
③ 模式选择
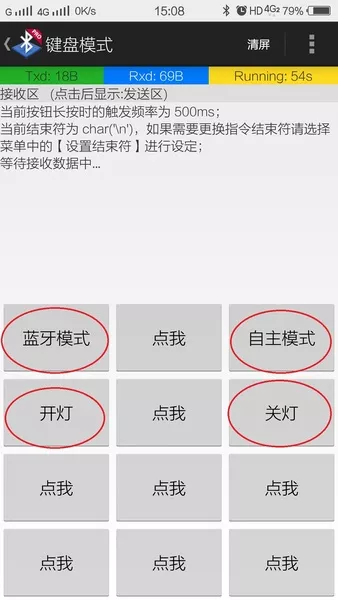
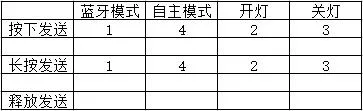
④ 按键设置
⑤ 各按键发送值
5. 资料清单
资料内容:
①程序源代码
②样机3D文件
资料下载链接:莲花灯-概述 https://www.robotway.com/h-col-287.html |


 发表于 2023-11-24 10:23:19
发表于 2023-11-24 10:23:19