本帖最后由 wzc0066 于 2013-8-27 13:09 编辑
SRV-1简介:
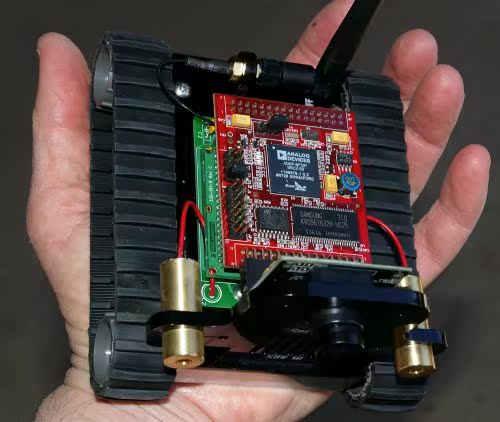
SRV-1是一款多功能履带式机器人,基于开源软件平台,通过WIFI进行全程无线通讯,并可实时采集现场视频,同时还支持自主运行以及集群管理模式。其设计可广泛应用于各个相关行业的科研、教学以及新产品原型开发等领域当中。
SRV-1无线通讯机器人由SRV-1 Blackfin摄像头主板(使用Analog Devices公司的500MHz Blackfin BF537 处理器),CMOS摄像头(分辨率由160x280到1280x1024像素),激光照射点以及WLAN 802.11b/g无线通讯模块组成,然后整合到一个双履带可移动的机体之上。
作为一个可以远程控制的网络摄像头或者一个具有自主导航能力的机器人,SRV-1可以在Blackfin主板的固件之中运行C语言解释器解释执行C 程序,或者在Windows,MacOS/X和Linux等系统上,运行基于Python或Java语言编写的控制台软件,进行远程管理。使用Java控 制台的软件,借助SRV-1内建的网络服务器,可以实现通过网络浏览器,在世界上任何地方监控并控制SRV-1,并可以根据需求保存视频。SRV-1 内置的固件还可以支持 RoboRealm 之类的第三方软件。
产品特点:
• 遵循GPL开放全部软件源码及硬件设计图
• 机器人具有执行自主运行程序的能力
• 第三方软件的支持,如 RoboRealm
• 可以通过软件控制台或网络浏览器实现对机器人的远程遥控,具备一定的监控能力
• 主机软件内建网络服务器并支持视频存档
• 机器人可以解释执行储存在FLASH中或内存中的C程序
• 无线遥控范围:室内 20 米室外 200 米
• 机器人可以通过终端控制台进行快捷的控制与调试
• 支持二次开发,适合高校的计算机,视觉图像处理,嵌入式,自动化控制等专业做科研教学或课题产品的原型设计及开发
• 支持GNU/Linux操作系统也同时支持直接在DSP上通过GNU bfin-elf-工具链开发bare-metal应用
硬件参数:
• 处理器:500MHz的ADI Blackfin BF537(1000 mips), 32MB SDRAM, 4MB SPI Flash, JTAG
• 摄像头:Omnivision OV7725, 30 万像素(最大分辨率 640x480) ,图像速度每秒最多可达 60 帧,视角范围为 90 度
• 串口无线通讯模块:Lantronix Matchport 802.11b/g WiFi
• 传感器:2个激光点
• 驱动:双路直流齿轮电机(四个电机,100:1齿轮减速比)驱动双履带
• 速度:20-40厘米每秒(大约1英尺每秒或0.5公里每小时)
• 框架:铝制机械
• 规格:120mm长 x 100mm宽 x 80mm高
• 重量:约350克
• 电源:7.2V 2Ah锂电池 使用时间大约4小时
• 充电器:100-240交流电50/60Hz
软件功能:
• 基本的图像处理能力:histogram, pixel sampling, frame difference, blob, scan, count, find
• 动态 JPEG 图像压缩处理能力
• 可支持的摄像头分辨率:1280x1024 (OV9655 适用), 640x480, 320x256, 160x128
• 提供了马达控制接口 WM (H-bridge) and PPM (servo) WM (H-bridge) and PPM (servo)
• 内置的类 c 解释器,支持用户编写脚本让其自主运行
• RTC 时钟精确到毫秒,内部定时器精确到 10 纳秒
• 支持扩展外接具有 I2C 或 SPI 通讯能力的设备
• 支持 XMODEM 文件传输协议
• 支持 GNU/Linux 操作系统(包括 u-boot/uClinux)
• 已支持的一些外部传感器: Maxbotics 超声波测距或者 Sharp 红外测距传感器;Locosys 或者 uBlox5 GPS 定位传感器; Honeywell HMC6352 或者 HMC5843 罗盘,ST LIS3LV02DQ 倾斜传感器, Analog Devices AD7998 8-channel A/D(多为第三方支持)
软件特点:
• 提供PC,Android,iOS以及NDSL各种平台的控制客户端
• 机器人固件更新方式简单,可支持通过web页面直接更新
• 丰富的客户端控制程序,覆盖桌面及各种移动终端系统(如Android/iOS/ADSL等)
• 丰富的控制协议支持,详细描述见用户手册中【机器人控制协议】
• 通过内置的微型HTTP服务模块实现了对机器人操控的平台无关性
• 通过内嵌的C解释器程序实现机器人的自主运行能力
• 强劲的邮件列表探讨支持
带外壳及搭载各种传感器版本:
Android平台丰富客户端:除了基本的控制操作之外,还内置有Google地图服务演示GPS实时定位,动态绘制3D方块演示姿态反馈等功能。

SRV-1机器人追逐红球视频:http://v.youku.com/v_show/id_XNDgxNTg1Mjg0.html SRV-1机器人追逐苹果视频:http://v.youku.com/v_show/id_XNDgxNjUwNjMy.html SRV-1简单苹果客户端控制:http://v.youku.com/v_show/id_XNTAyMTcxMjUy.html
http://item.taobao.com/item.htm?spm=a1z10.1.w5146634-3197777164.1.wOCfNP&id=9434054609 | 

 发表于 2013-8-27 13:06:44
发表于 2013-8-27 13:06:44

 楼主
楼主